- Conditional VAE in Human-Robot Interaction
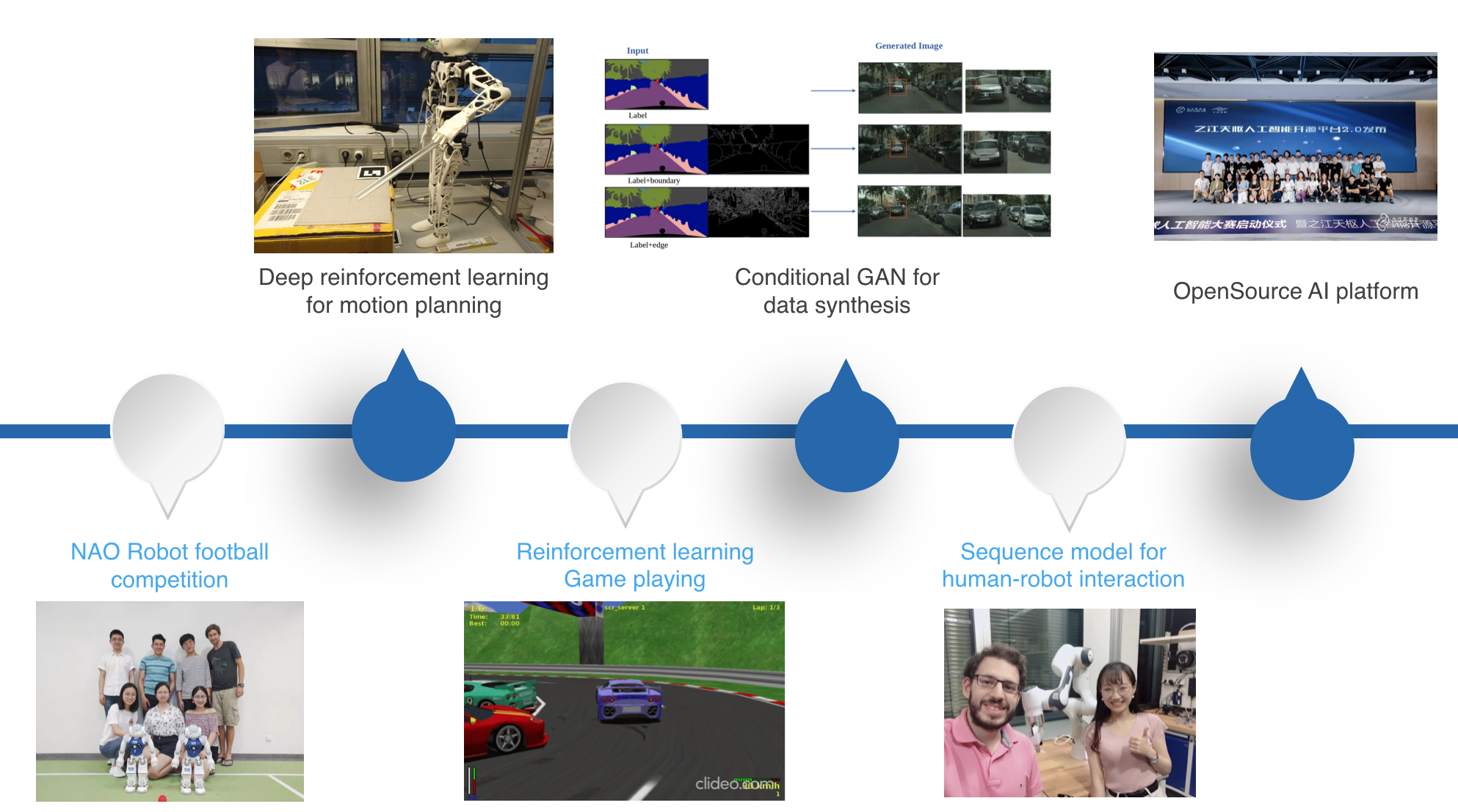
Deep Learning for robot motion planning in human-robot interaction (HRI). We propose a real-time probabilistic model using LSTM-based conditional variational autoencoder (CVAE) for structured robot control policy learning and inference.
Supervisor: Prof. Dr. Patrick van der Smagt, Prof. Dr.-Ing. Sami Haddadin
Keynotes: Variational AutoEncoder, BiLSTM, Human-Robot Interaction, Learning from Demonstration
- Car racing game playing
Apply Deep Reinforcement Learning (DDPG specifically) to control Torcs (a car racing game) agent’s movement. At each time step, car can move by steering, accelerating and braking.

- Motion Planning with Reinforcement Learning
Vision-based Poppy Humanoid robot reaching Movement Learning with Deep Deterministic Policy Gradient(DDPG).
- Face segmentation
Real-time human face segmentation based on webcam through lightweight LinkNet34 DL models.